Letsoho la Roboto e Kopanetsoeng ea Liindasteri tse 6 tsa Axis bakeng sa ho Paka


Letsoho la Roboto e Kopanetsoeng ea Liindasteri tse 6 tsa Axis bakeng sa ho Paka
Sehlopha se ka Sehloohong
AGV AMR / ho phahamisa ka jack up AGV AMR / koloi e tataiswang ka boiketsetso ya AGV / roboto ya mohala e ikemetseng ya AMR / koloi ya AGV AMR bakeng sa ho sebetsana le thepa ya indasteri / Moetsi wa China roboto ya AGV / ntlo ya polokelo AMR / AMR ho phahamisa ka jack up laser SLAM navigation / roboto ya mohala ya AGV AMR / AGV AMR chassis laser SLAM navigation / roboto e bohlale ya logistic
Kopo

Chassis e se nang motho ea AMB Series AMB (Auto Mobile Base) bakeng sa koloi e ikemetseng ea agv, chassis ea bokahohle e etselitsoeng likoloi tse tsamaisoang ke agv tse ikemetseng, e fana ka likarolo tse ling tse kang ho hlophisa 'mapa le ho tsamaisa sebaka. Chassis ena e se nang motho ea kariki ea agv e fana ka li-interface tse ngata tse kang I/O le CAN ho kenya li-module tse fapaneng tse kaholimo hammoho le software e matla ea bareki le litsamaiso tsa ho romela ho thusa basebelisi ho phethela tlhahiso le ts'ebeliso ea likoloi tse ikemetseng tsa agv kapele. Ho na le masoba a mane a ho kenya holim'a chassis e se nang motho ea letoto la AMB bakeng sa likoloi tse tsamaisoang ke agv tse ikemetseng, e tšehetsang katoloso e sa reroang ka jacking, rollers, manipulators, patent traction, ponts'o, jj. ho fihlela lits'ebetso tse ngata tsa chassis e le 'ngoe. AMB hammoho le SEER Enterprise Enhanced Digitalization e ka phethahatsa ho romelloa le ho kenngoa ha lihlahisoa tse makholo tsa AMB ka nako e le 'ngoe, e leng se ntlafatsang haholo boemo bo bohlale ba thepa ea ka hare le lipalangoang fekthering.
Tšobotsi
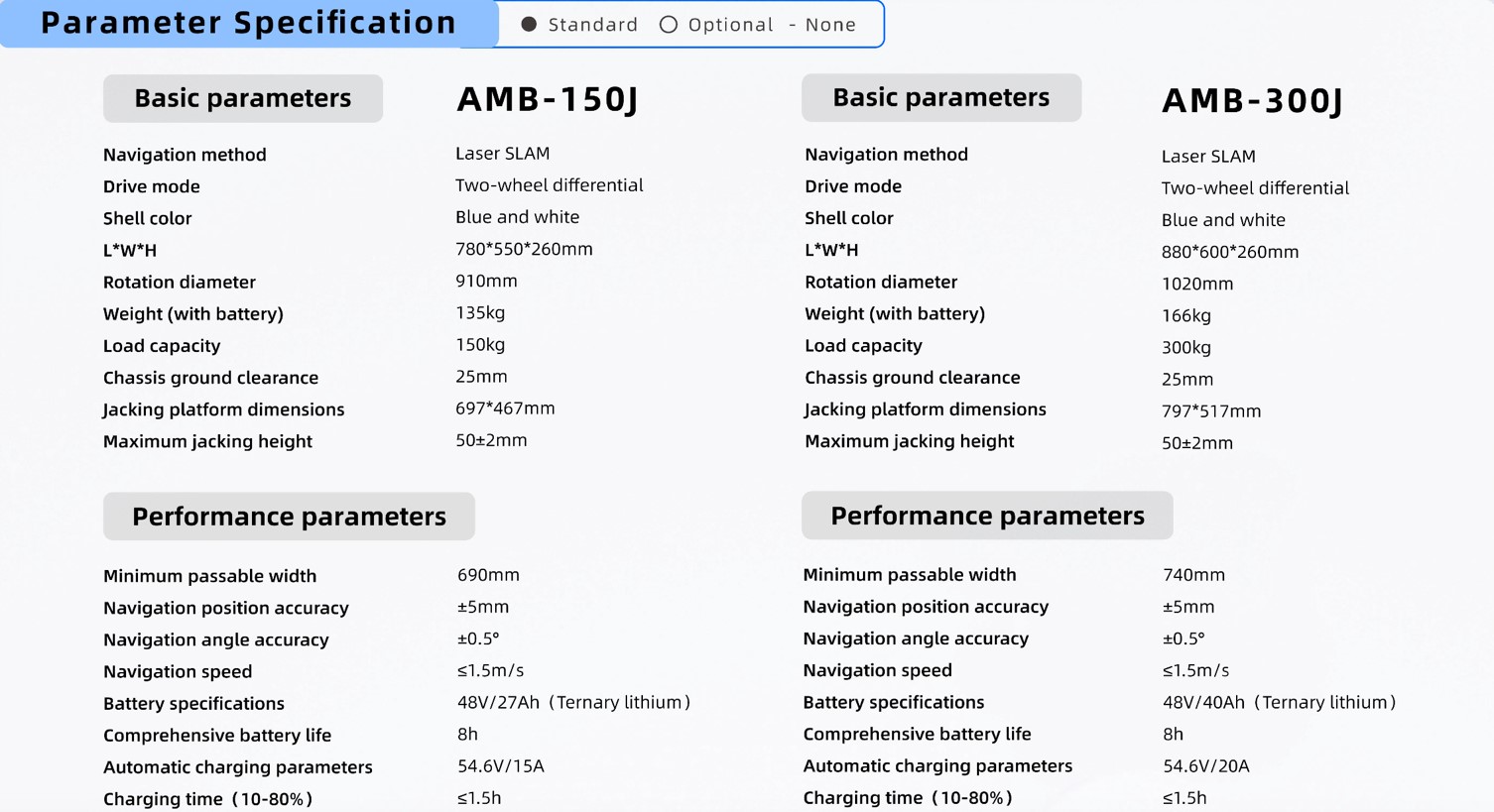
·Bokgoni ba ho jara: 150kg le 300kg
·Bophahamo bo phahameng ba ho jaka: 50mm
·Ho nepahala ha sebaka sa ho tsamaya: ± 5mm
·Ho nepahala ha sekhutlo sa ho tsamaya: ± 0.5°
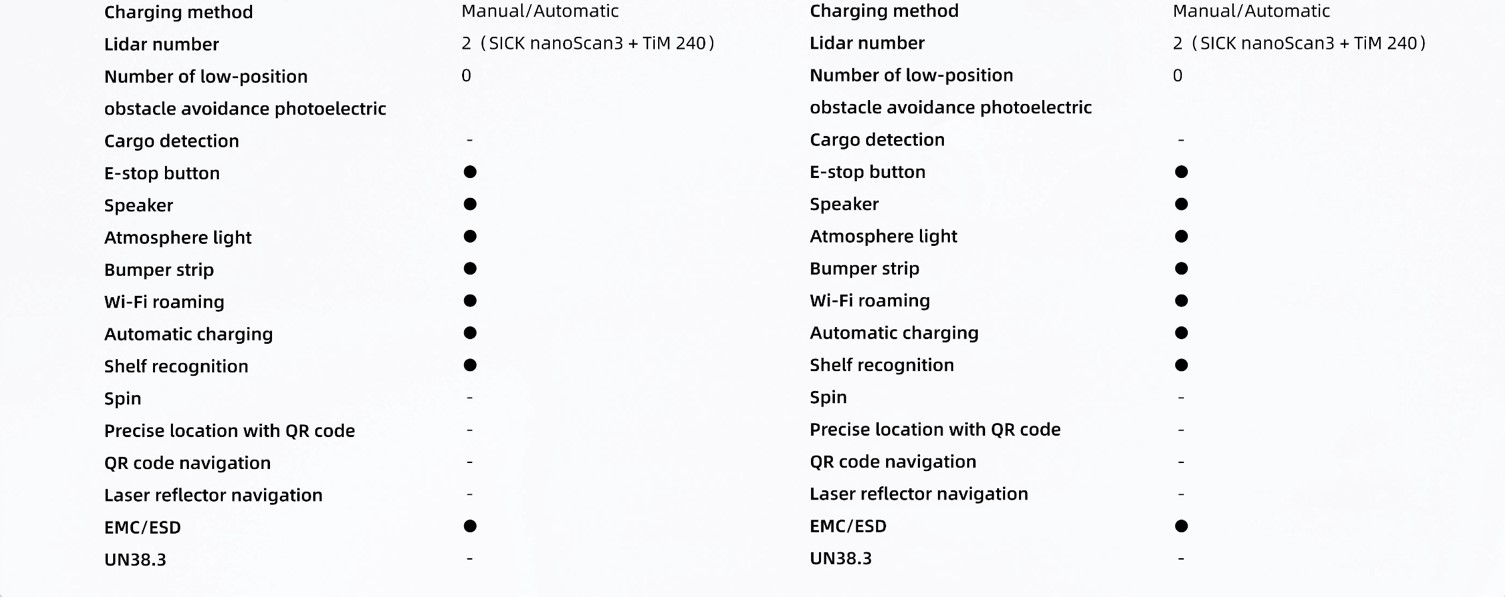
● Likarolo tse ruileng li fumaneha neng kapa neng
Likarolo tse akaretsang le tse ntle tsa maemo a tloaelehileng le likarolo tse ruileng le tse sebetsang tse tsoetseng pele li thusa bareki ho fumana thepa e bohlale habonolo.
● Li-platform tsa litlhaloso tse ngata lia fumaneha bakeng sa katoloso
Fana ka liforomo tsa 150kg le 300kg ho fihlela litlhoko tsa mojaro le sebaka sa indasteri tse fapaneng. E ka boela ea sebelisoa le li-manipulator, li-roller, li-jacking, li-latent traction, pane/ho sekamela, skrine ea ponts'o, jj. ho fihlella lits'ebetso tse ngata ka chassis e le 'ngoe.
● ± 5 mm, e sebetsang hantle le e nepahetseng
Algorithm ea Laser SLAM e sebelisetsoa ho fihlella sebaka se nepahetseng haholo, ka ho nepahala ha ho fumana sebaka ka laser ho sa bontsheng khanya ka hare ho ±5 mm, ho nolofalletsa ho emisa ka mokhoa o se nang sekoli pakeng tsa liroboto tse tsamaeang le batho, le phallo e sebetsang ea thepa har'a lintlha tse fapaneng. Hlokomela: Boleng ba 'nete bo itšetlehile ka maemo a tikoloho.
● Tsamaiso e tsitsitseng bakeng sa polokeho le botshepehi
Ho tsamaya ka laser SLAM, ho tsamaya ka laser reflector, ho tsamaya ka khoutu ya QR le mekgwa e meng ya ho tsamaya e kopantswe ka botlalo mme e fetolwa ka mokhoa o se nang mathata ho netefatsa tshebetso e tsitsitseng ya roboto e tsamayang.
● Ho kenya tshebetsong habonolo le tsamaiso e bonahalang
Mefuta e felletseng ea mananeo a tšehetsang le litsamaiso tsa dijithale li ka etsa ts'ebetso, kemiso le taolo ea tlhahisoleseling ea liroboto tse tsamaeang habonolo, 'me tsa hokahana ka mokhoa o se nang mathata le sistimi ea MES ea fektheri ho phethahatsa e le kannete lisebelisoa tse bohlale tsa thepa.
Lihlahisoa tse Amanang



Paramethara ea Tlhaloso
Khoebo ea Rona


Lihlopha tsa lihlahisoa
-

Mochini oa ho tjheseletsa oa Lh1850-B-6 6-Axis o Iketsang ka...
-

Automa ea Motlakase ea Smart Laser ea 1000kg ...
-

Robot Arm ea Liroboto ea Liindasteri tse 6 tsa Axis Arox Aromic Robot ...
-
Mochini oa ho tjheseletsa oa Roboto oa Indasteri o Iketsang ...
-

6 Axis Industrial Robot Arm Szgh-I5 Tšebelisano-'moho ...
-
Kopano ea Theko e Tlase, Ho Palletisa, Ho bentša, Spr ...