Mochini o Felletseng oa Robotic Palletizer o Iketsang o nang le Robot Arm


Mochini o Felletseng oa Robotic Palletizer o Iketsang o nang le Robot Arm
Sehlopha se ka Sehloohong
AGV AMR / ho phahamisa ka jack up AGV AMR / koloi e tataiswang ka boiketsetso ya AGV / roboto ya mohala e ikemetseng ya AMR / koloi ya AGV AMR bakeng sa ho sebetsana le thepa ya indasteri / Moetsi wa China roboto ya AGV / ntlo ya polokelo AMR / AMR ho phahamisa ka jack up laser SLAM navigation / roboto ya mohala ya AGV AMR / AGV AMR chassis laser SLAM navigation / roboto e bohlale ya logistic
Ho hlahisa letsoho la ho sebetsana le roboto le fetolang papali la indasteri la ho kenya dipaleteng, ho kenya mekotla le ho paka mabokoseng, tharollo e ncha e tla fetola mekgwa ya ho paka le ho tshwara ya indasteri. Letsoho lena la roboto le sejoale-joale le etseditswe ho eketsa bokgoni le tlhahiso ha ka nako e ts'oanang le netefatsa hore mekotla, mabokose le dipakete di sebetswa ka mokhoa o sireletsehileng le o bolokehileng.
Ha tlhoko ea lebelo le ho nepahala e ntse e tsoela pele ho hola tlhahisong le tsamaisong ea thepa, matsoho a rona a roboto a sebetsanang le liphaleteng tsa indasteri, ho bokella, ho paka mekotla le mekotla ke karabo ea ho qetela. Matsatsi a mosebetsi oa matsoho a felile le kotsi ea liphoso tsa batho. Letsoho lena le tsoetseng pele la roboto le hlophisitsoe ho kopanya mekotla, ho e kopanya le ho e sebetsana habonolo le mefuta eohle ea mekotla, mabokose le liphutheloana, ho fana ka ts'ebetso e se nang mathata ka nako e fokolang ea ho se sebetse.
Letsoho la ho tshwara la roboto bakeng sa tshebediso ya diindasteri, ho kenya dipaleteng, ho bokella le ho paka mekotla le mabokose, le na le sete e sa tshwaneng ya dikarolo tse le kgethollang ho mekgwa ya setso. Letsoho la roboto le na le di-sensor le theknoloji ya sejoale-joale ho netefatsa motsamao o nepahetseng le o tsitsitseng, ho fedisa kgonahalo ya ho se sebetse hantle kapa tshenyo dihlahisweng tse tshwarwang. Bokgoni ba lona ba lebelo le phahameng, hammoho le bokgoni ba ho lemoha le ho fetola dibopeho le boholo bo fapaneng ka nepo, bo eketsa lebelo le bokgoni ba mesebetsi ya ho paka haholo.
Ho phaella moo, letsoho lena la roboto le na le mekhoa e mengata haholo, e leng se etsang hore le lokele liindasteri tse fapaneng. Ho tloha ho lokisa lijo ho isa ho meriana, polokelo ea thepa ho isa tlhahisong, tharollo ena ea roboto e ka ikamahanya le maemo le mesebetsi e fapaneng ntle le mathata. Ebang ke ho sebetsana le mekotla ea boima bo fapaneng, ho paka mabokose ka nepo, kapa ho paka lihlahisoa ka hloko, matsoho a rona a ho tšoara liroboto tsa indasteri tse kang ho kenya lipaleteng, ho paka ka lipakete le ho paka ka mabokose ke tharollo e phethahetseng.
Ka bokhutšoanyane, Letsoho la ho Tšoara Roboto ea ho Paka Lebokose la Liphasele tsa Liindasteri ke phetoho e kholo lefatšeng la ho paka le ho sebetsana le liindasteri. Ka likarolo tsa eona tse tsoetseng pele, bokhoni bo sa bapisoeng le ho tenyetseha, tharollo ena e ncha e tla fetola indasteri ka ho eketsa tlhahiso haholo, ho fokotsa litšenyehelo tsa basebetsi le ho netefatsa polokeho ea sehlahisoa. Lula u le ka pele ho tlholisano 'me u amohele bokamoso ba boiketsetso ba indasteri ka matsoho a rona a roboto a sejoale-joale.
Kopo

Chassis e se nang motho ea AMB Series AMB (Auto Mobile Base) bakeng sa koloi e ikemetseng ea agv, chassis ea bokahohle e etselitsoeng likoloi tse tsamaisoang ke agv tse ikemetseng, e fana ka likarolo tse ling tse kang ho hlophisa 'mapa le ho tsamaisa sebaka. Chassis ena e se nang motho ea kariki ea agv e fana ka li-interface tse ngata tse kang I/O le CAN ho kenya li-module tse fapaneng tse kaholimo hammoho le software e matla ea bareki le litsamaiso tsa ho romela ho thusa basebelisi ho phethela tlhahiso le ts'ebeliso ea likoloi tse ikemetseng tsa agv kapele. Ho na le masoba a mane a ho kenya holim'a chassis e se nang motho ea letoto la AMB bakeng sa likoloi tse tsamaisoang ke agv tse ikemetseng, e tšehetsang katoloso e sa reroang ka jacking, rollers, manipulators, patent traction, ponts'o, jj. ho fihlela lits'ebetso tse ngata tsa chassis e le 'ngoe. AMB hammoho le SEER Enterprise Enhanced Digitalization e ka phethahatsa ho romelloa le ho kenngoa ha lihlahisoa tse makholo tsa AMB ka nako e le 'ngoe, e leng se ntlafatsang haholo boemo bo bohlale ba thepa ea ka hare le lipalangoang fekthering.
Tšobotsi
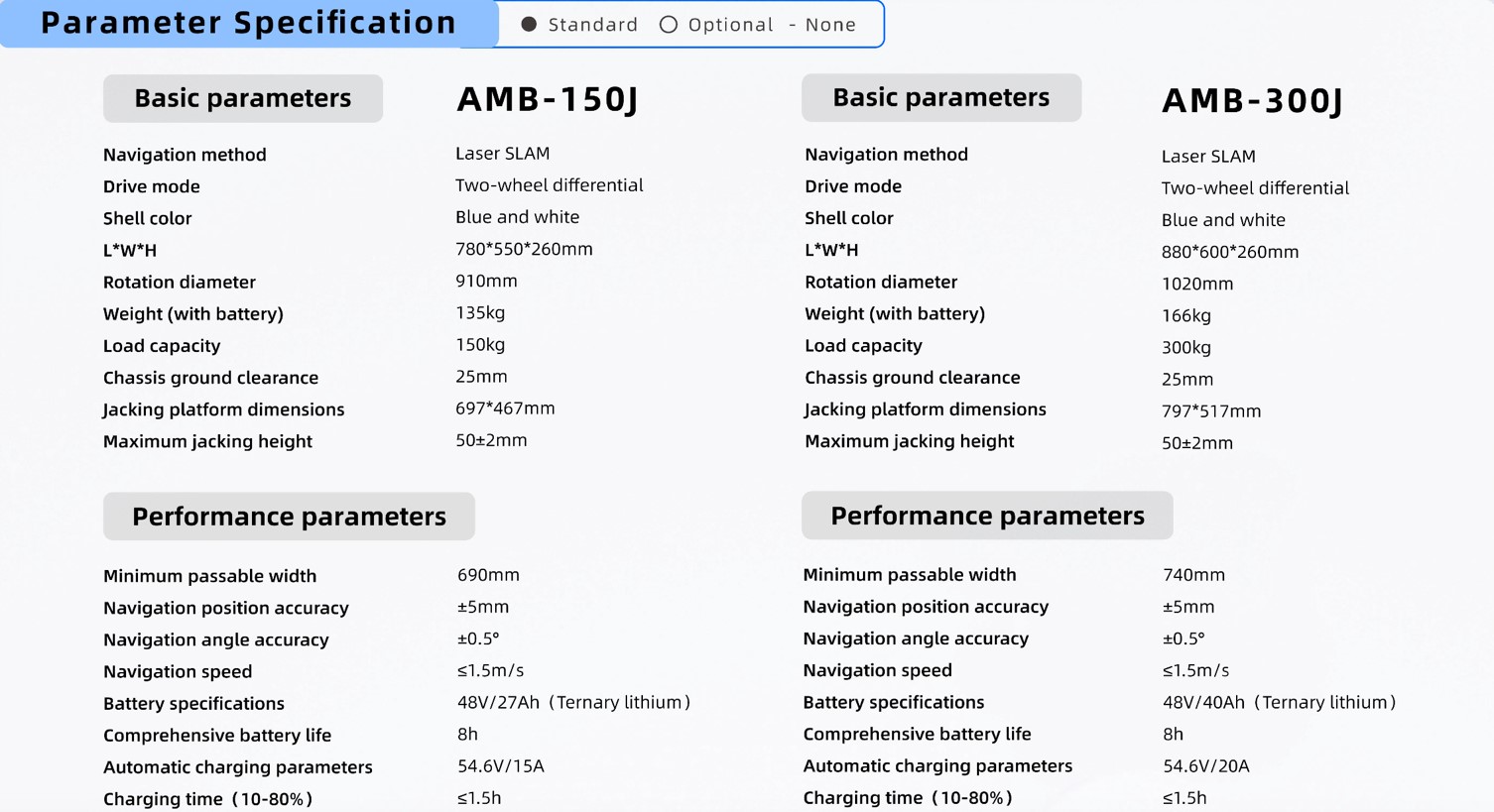
·Bokgoni ba ho jara: 150kg le 300kg
·Bophahamo bo phahameng ba ho jaka: 50mm
·Ho nepahala ha sebaka sa ho tsamaya: ± 5mm
·Ho nepahala ha sekhutlo sa ho tsamaya: ± 0.5°
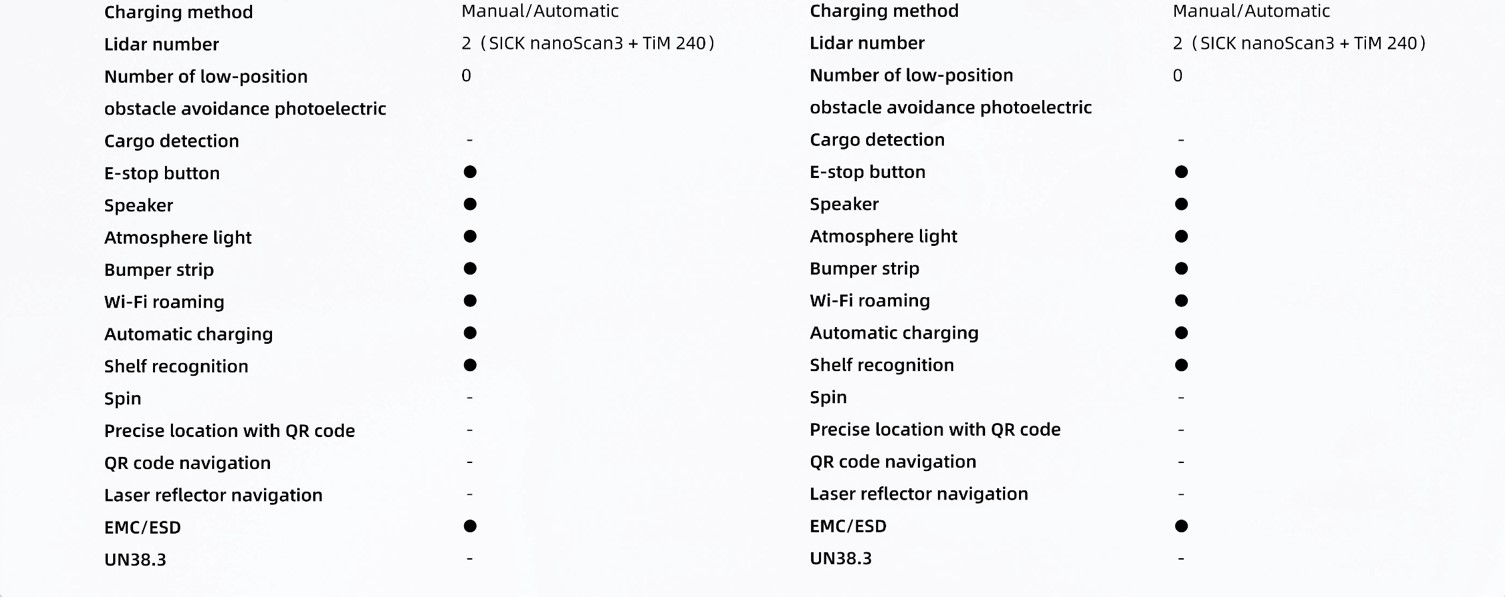
● Likarolo tse ruileng li fumaneha neng kapa neng
Likarolo tse akaretsang le tse ntle tsa maemo a tloaelehileng le likarolo tse ruileng le tse sebetsang tse tsoetseng pele li thusa bareki ho fumana thepa e bohlale habonolo.
● Li-platform tsa litlhaloso tse ngata lia fumaneha bakeng sa katoloso
Fana ka liforomo tsa 150kg le 300kg ho fihlela litlhoko tsa mojaro le sebaka sa indasteri tse fapaneng. E ka boela ea sebelisoa le li-manipulator, li-roller, li-jacking, li-latent traction, pane/ho sekamela, skrine ea ponts'o, jj. ho fihlella lits'ebetso tse ngata ka chassis e le 'ngoe.
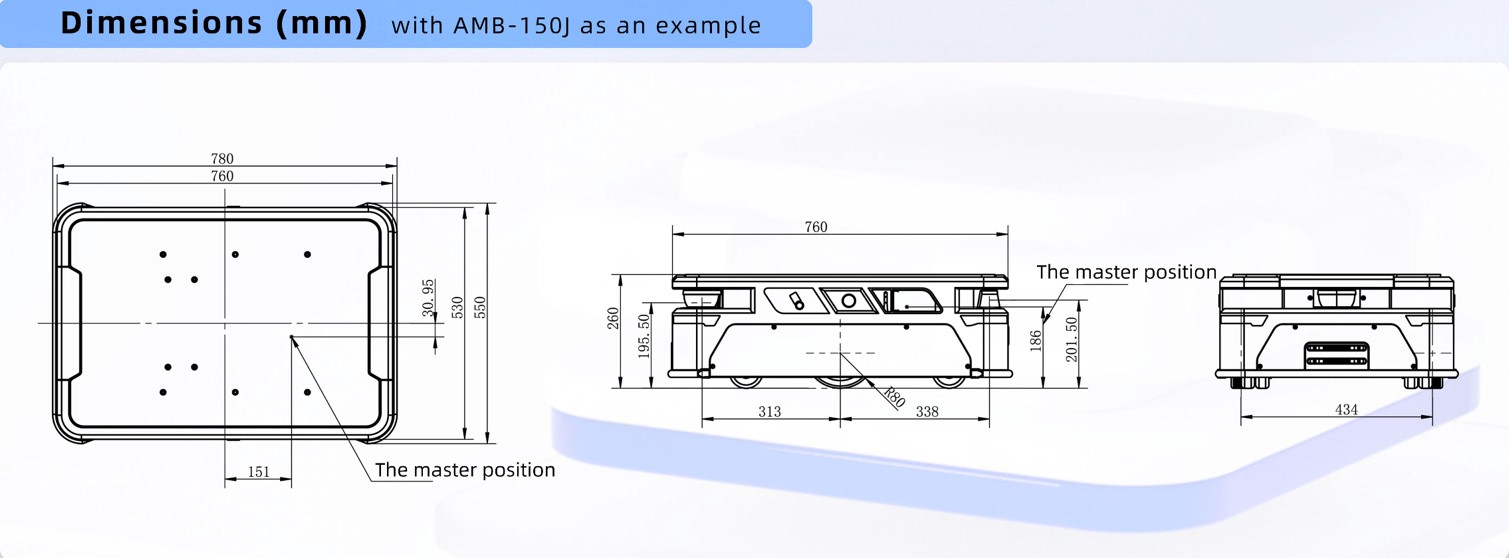
● ± 5 mm, e sebetsang hantle le e nepahetseng
Algorithm ea Laser SLAM e sebelisetsoa ho fihlella sebaka se nepahetseng haholo, ka ho nepahala ha ho fumana sebaka ka laser ho sa bontsheng khanya ka hare ho ±5 mm, ho nolofalletsa ho emisa ka mokhoa o se nang sekoli pakeng tsa liroboto tse tsamaeang le batho, le phallo e sebetsang ea thepa har'a lintlha tse fapaneng. Hlokomela: Boleng ba 'nete bo itšetlehile ka maemo a tikoloho.
● Tsamaiso e tsitsitseng bakeng sa polokeho le botshepehi
Ho tsamaya ka laser SLAM, ho tsamaya ka laser reflector, ho tsamaya ka khoutu ya QR le mekgwa e meng ya ho tsamaya e kopantswe ka botlalo mme e fetolwa ka mokhoa o se nang mathata ho netefatsa tshebetso e tsitsitseng ya roboto e tsamayang.
● Ho kenya tshebetsong habonolo le tsamaiso e bonahalang
Mefuta e felletseng ea mananeo a tšehetsang le litsamaiso tsa dijithale li ka etsa ts'ebetso, kemiso le taolo ea tlhahisoleseling ea liroboto tse tsamaeang habonolo, 'me tsa hokahana ka mokhoa o se nang mathata le sistimi ea MES ea fektheri ho phethahatsa e le kannete lisebelisoa tse bohlale tsa thepa.
Lihlahisoa tse Amanang



Paramethara ea Tlhaloso
Khoebo ea Rona


Lihlopha tsa lihlahisoa
-

Cobot China Aubo-I10 Brazo Robó Tico Industrial...
-

Desktop Small 4 Axis Scara Industrial Robot Arm ...
-

Letsoho la Manipulator la Axis 6 la Bohlale la Indasteri ...
-

Software ea Hardware ea Robot Arm Gripper ea Liindasteri ...
-

Iimt Collaborative Robot Industrial Robots 6 Ax...
-

Roboto e Tšebelisano-'moho ea Liroboto tsa Liindasteri tse 6 Axis A...