SCARA ROBOTIC ARMS – Z-Arm-2442B Sebetsa-'moho sa Robotic Arm



Sehlopha se ka Sehloohong
Letsoho la roboto ea indasteri / Letsoho la roboto le sebelisanang 'moho / Sehokelo sa motlakase / Sesebelisoa sa ho sebetsa ka bohlale / Litharollo tsa Automation
Kopo
Li-cobot tsa SCIC Z-Arm ke liroboto tse bobebe tse sebelisanang 'moho tsa li-axis tse 4 tse nang le enjene ea drive e hahiloeng kahare, 'me ha li sa hloka li-reducer joalo ka li-scara tse ling tsa setso, tse fokotsang litšenyehelo ka 40%. Li-cobot tsa SCIC Z-Arm li ka etsa mesebetsi e kenyeletsang empa ha e felle feela ho khatiso ea 3D, ho sebetsana le thepa, ho tjheseletsa le ho betla ka laser. E khona ho ntlafatsa haholo bokhoni le ho tenyetseha ha mosebetsi le tlhahiso ea hau.
Likaroloana

Ho nepahala ho Hoholo
Ho Pheta-pheta
± 0.02mm
Moroalo o Moholo
5kg
Sephara se Seholo sa Letsoho
Sehokelo sa JI 220mm
Mokhahlelo oa J2 200mm
Theko ea Tlholisano
Boleng ba maemo a indasteri
Ctheko e hlōlisanang
Lihlahisoa tse Amanang



Paramethara ea Tlhaloso
SCIC Z-Arm 2442B e entsoe ke SCIC Tech, ke roboto e bobebe e sebelisanang, e bonolo ho e hlophisa le ho e sebelisa, e tšehetsa SDK. Ho phaella moo, e tšehetsoa ke ho lemoha ho thulana, e leng, e tla ba ho iketsahalla ho emisa ha o ama motho, e leng tšebelisano-'moho e bohlale ea motho le mochini, tšireletso e phahame.
| Letsoho la Roboto le Kopanetsoeng la Z-Arm 2442B | Liparamitha |
| Bolelele ba letsoho la axis e le 1 | 220mm |
| Sekhutlo sa potoloho sa axis e le 1 | ±90° |
| Bolelele ba matsoho a axis tse 2 | 200mm |
| Sekhutlo sa ho potoloha ha axis tse 2 | ±164° (Boikhethelo: 15-345deg) |
| Seropo sa Z axis | 240 (Bophahamo bo ka fetoloa) |
| Sebaka sa potoloho ea axis ea R | ± 1080° |
| Lebelo la mola | 1600mm/s (mojaro o boima ba 4kg) |
| Ho Pheta-pheta | ± 0.02mm |
| Moroalo o tloaelehileng oa moputso | 4kg |
| Moroalo o moholo ka ho fetisisa | 5kg |
| Tekanyo ea tokoloho | 4 |
| Phepelo ea motlakase | 220V/110V50-60HZ e ikamahanya le matla a tlhoro a 48VDC 200W |
| Puisano | Ethernet |
| Ho katoloha | Taolo ea motsamao e kopantsoeng e hahiloeng kahare e fana ka katoloso ea 24 I/O + tlas'a letsoho |
| Mokhahlelo oa Z o ka fetoloa ka bolelele | 0.1m-0.5m |
| Thuto ea ho hulanya ka axis ea Z | / |
| Sebopeho sa motlakase se boloketsoe | Sebopeho se tloaelehileng: Lithapo tsa 24*23awg (tse sa sireletsoang) tse tsoang phanele ea sokete ho pholletsa le sekoahelo se ka tlase sa letsoho Boikhethelo: liphaephe tse 2 tsa vacuum tsa φ4 tse fetang ka phanele ea sokete le flange |
| Li-gripper tsa motlakase tsa HITBOT tse lumellanang | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Leseli le hemang | / |
| Motsamao oa letsoho la bobeli | E tloaelehileng: ±164° Boikhethelo: 15-345deg |
| Lisebelisoa tse sa hlokeheng | / |
| Sebelisa tikoloho | Mocheso o tloaelehileng: 0-45°C Mongobo: 20-80%RH85 (ha ho serame) |
| Ho kenya ha dijithale koung ya I/O (ho arotswe) | Katoloso ea letsoho la 9+3+phatla (ha ho hlokahale) |
| Tlhahiso ea dijithale ea koung ea I/O (e arotsoeng ka thoko) | Katoloso ea letsoho la 9+3+phatla (ha ho hlokahale) |
| Ho kenya analoge ea koung ea I/O (4-20mA) | / |
| Tlhahiso ea analoge ea koung ea I/O (4-20mA) | / |
| Bophahamo ba letsoho la roboto | 683mm |
| Boima ba letsoho la roboto | Boima ba letlooa ba 240mm stroke 27kg |
| Boholo ba motheo | 250mm*250mm*15mm |
| Sebaka se pakeng tsa masoba a ho lokisa motheo | 200mm*200mm e nang le dikurufu tse nne tsa M8*20 |
| Ho lemoha ho thulana | √ |
| Ho ruta ka ho hula | √ |
Mofuta oa Motsamao oa M1 (Potoloha ka Ntle)
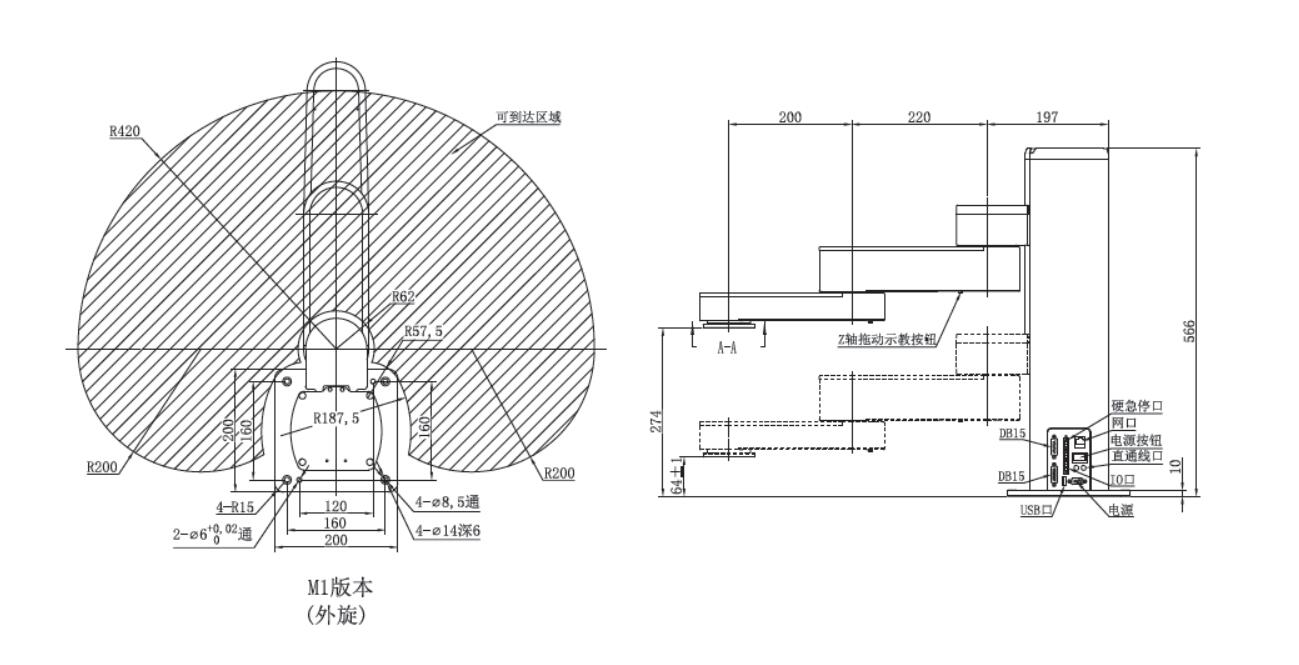
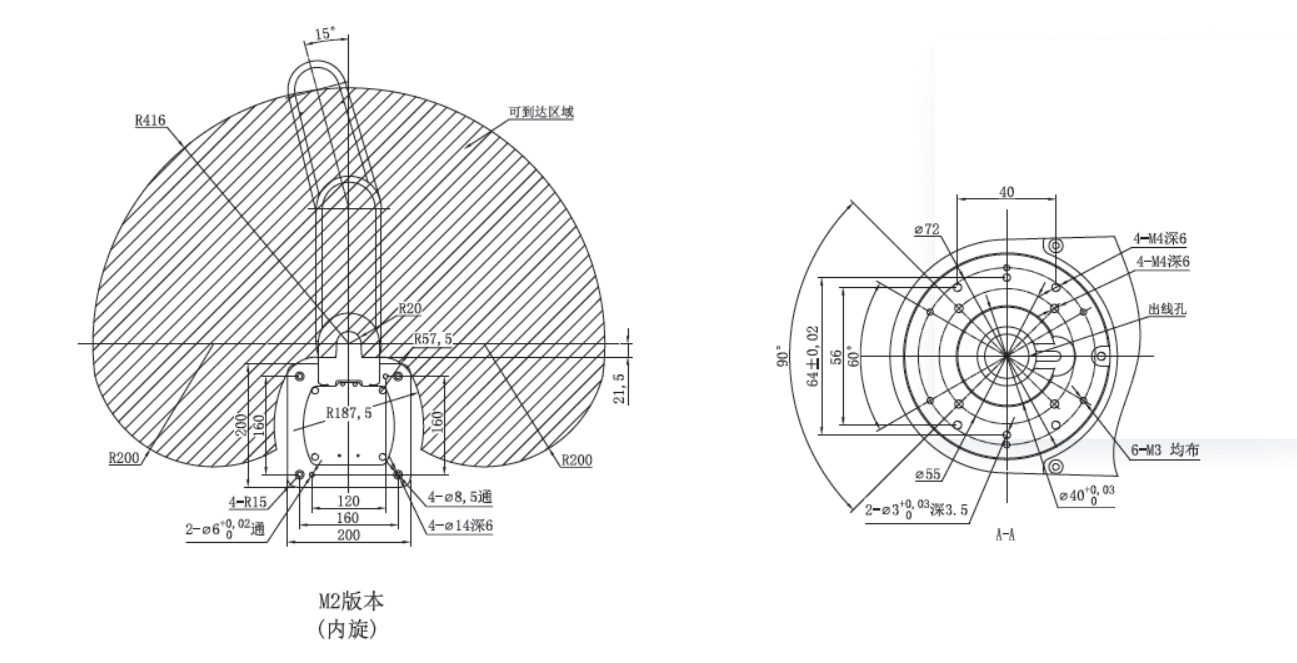
Selelekela sa Sebopeho

Sebopeho sa letsoho sa roboto sa Z-Arm 2442 se kentswe dibakeng tse 2, lehlakore la motheo wa letsoho la roboto (le hlaloswang e le A) le ka morao ho letsoho la ho qetela. Phanele ea sebopeho ho A e na le sebopeho sa switch ea motlakase (JI), sebopeho sa phepelo ea motlakase sa 24V DB2 (J2), tlhahiso ho koung ea I/O ea mosebelisi DB15 (J3), koung ea I/O ea mosebelisi DB15 (J4) le likonopo tsa tlhophiso ea aterese ea IP (K5). Koung ea Ethernet (J6), koung ea tlhahiso/tlhahiso ea sistimi (J7), le li-socket tse peli tsa lithapo tse otlolohileng tsa 4-core J8A le J9A.
Mehato ya tlhokomelo
1. Boima ba mojaro oa moputso
Setsi sa boima ba mojaro oa matla a khoheli le sebaka se khothaletsoang sa mojaro oa mojaro o nang le inertia ea motsamao oa axis ea Z li bontšitsoe ho Setšoantšo sa 1.

Tlhaloso ea mojaro oa letoto la XX32 Setšoantšo sa 1
2. Matla a ho thulana
Matla a qholotsang a tšireletso ea ho thulana ha manonyeletso a rapameng: matla a letoto la XX42 ke 40N.
3. Matla a kantle a Z-axis
Matla a kantle a axis ea Z ha aa lokela ho feta 120N.

Setšoantšo sa 2
4. Lintlha tsa ho kenya axis ea Z e ikhethileng, bona Setšoantšo sa 3 bakeng sa lintlha tse qaqileng.

Setšoantšo sa 3
Tlhokomeliso ea Temoso:
(1) Bakeng sa Z-axis e ikhethileng e nang le stroke e kholo, Ho tiea ha Z-axis hoa fokotseha ha stroke e ntse e eketseha. Ha stroke ea Z-axis e feta boleng bo khothaletsoang, mosebelisi o na le tlhoko ea ho tiea, 'me lebelo ke >50% ea lebelo le phahameng ka ho fetisisa, ho khothaletsoa haholo ho kenya tšehetso ka morao ho Z-axis ho netefatsa hore ho tiea ha letsoho la roboto ho fihlela tlhoko ka lebelo le phahameng.
Boleng bo khothaletsoang ke bo latelang: Z-ArmXX42 letoto la Z-axis stroke >600mm
(2) Kamora hore ho otloa ha Z-axis ho eketsehe, ho otloloha ha Z-axis le setsi ho tla fokotseha haholo. Haeba litlhoko tse tiileng tsa ho otloloha bakeng sa Z-axis le setsi sa referense li sa sebetse, ka kopo buisana le basebetsi ba tekheniki ka thoko.
5. Ho thibela ho hotetsa ha thapo ya motlakase ho thibetsoe. Temoso ya ho kgutlisa morao ha dipalo tse ntle le tse mpe tsa phepelo ya motlakase di kgaotswe.
6. O se ke wa hatella letsoho le otlolohileng ha motlakase o timme.

Setšoantšo sa 4
Khothaletso ea Sehokelo sa DB15

Setšoantšo sa 5
Mohlala o kgothaletswang: Monna ya tshwerweng ka kgauta e nang le khetla ya ABS YL-SCD-15M E tshehadi e tshwerweng ka kgauta e nang le khetla ya ABS YL-SCD-15F
Tlhaloso ea Boholo: 55mm*43mm*16mm
(Sheba Setšoantšo sa 5)
Tafole ea Li-Gripper tse Lumellanang le Robot Arm
| Nomoro ea Mohlala oa Letsoho la Roboto | Li-Gripper tse lumellanang |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Khatiso ea 3D ea Z-EFG-30NM NMA ea axis ea bohlano |
| XX42 T2 | Z-EFG-50 TSOHLE/Z-EFG-100 TXA |
Setšoantšo sa Boholo ba ho Kenya Adaptara ea Matla
Phepelo ea motlakase ea XX42 24V 500W RSP-500-SPEC-CN

Setšoantšo sa Tikoloho ea Tšebeliso ea Kantle ea Letsoho la Roboto

Khoebo ea Rona


Lihlopha tsa lihlahisoa
-

LETLALO LA LI-GRIPPER TSA MOTLAKASE TSA HITBOT – Z-ERG-20 Rotar...
-

LIROBOTO TSA HO JAKANG – Roboto e Phahamisang ea Laser SLAM...
-

LIROBOTO TSA HO JAKANG - Roboto e Phahamisang ea Rotary AMB ...
-

LETLALO LA LI-GRIPPER TSA MOTLAKASE TSA HITBOT – Z-EFG-10...
-

LETLALO LA TM AI COBOT – TM14M 6 Axis AI Cobot
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-26 Paral...